
Dicas de Informática: software CPU-Z – Diagnóstico, Monitorização e Relatórios acerca do seu PC (Sistema e Hardware)
Este é um programa que vale a pena instalar se quer saber tudo acerca do seu PC.
Muito útil para os técnicos mas não só.
Até porque há por aí muito material “falsificado”, isto é, vendido como “gato por lebre” – memórias com uma capacidade que nem vê-la; forcing de componentes para obter certos resultados/desempenho, mas que põem em perigo o componente ou todo o sistema, etc,.
E tem a vantagem de ser um freeware cuja qualidade pede meças aos putativamente mais profissionais e pagos.
É de aproveitar.
Fica abaixo uma descrição do programa, alguns ecrãs e o link do site, de onde poderá fazer o download gratuito.
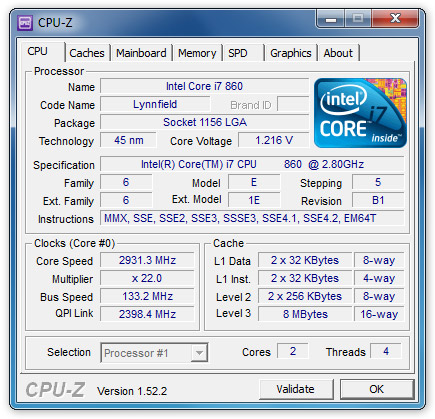
O Que é o CPU-Z
. é um software gratuito que capta informação sobre alguns dos principais dispositivos do seu sistema informático (PC)
CPU
Nome e número.
Velocidade do núcleo e dos processos.
Empacotamento.
Tensão do núcleo.
Relógios/clocks internos e externos, multiplicador do clock.
Conjuntos de instruções suportadas.
Informação da Cache.
Motherboard
Vendedor, modelo e versão.
Modelo da BIOS e sua data.
Chipset (northbridge esouthbridge) e sensor.
Interface gráfica.
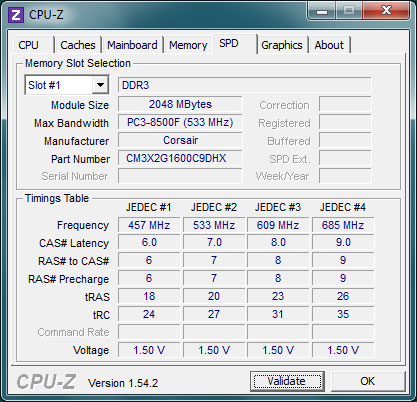
Memória
Frequencia e periódos.
Especificação de módulos usando o método SPD (Serial Presence Detect) : vendedor, número de série, tabela de períodos/latências.
Sistema
Versões do Windows e DirectX.

Março 28, 2013 No Comments
Robótica – Apontamentos (parte 9) / Ficha de Trabalho 9, com questionário (actuadores: hidráulicos, pneumáticos, motores eléctricos)
Curso Profissional de Electrónica, Automação e Comando
Disciplina de Automação e Comando
Módulo: Robótica
[…continuação]
Apontamentos de Robótica / Ficha de Trabalho 9
Parte 9
19. Accionadores / Actuadores
19.1. Definição
São dispositivos responsáveis pelo movimento das articulações e do desempenho dinâmico do robot. Podem ser eléctricos, hidráulicos ou pneumáticos.
19.2. Actuadores Hidráulicos
19.2.1. – Componentes
Os seus principais componentes são:
Motor;
Cilindro;
Bomba de óleo;
Válvula;
Reservatório de óleo.
19.2.2. – Características Mais Importantes
. O motor faz com que o óleo flua no cilindro, em direcção ao pistão que, por sua vez movimenta a junta do braço.
. Este tipo de actuador é (hidráulico), como facilmente se deduz, mais utilizado em robots de maior porte, sendo que a sua precisão é menor.
. Existem vários tipos de motores hidráulicos, como o motor de palheta, o de engrenagem, o de lóbulos, etc. apresentando todos eles um elevado torque com massa e volume reduzidos.
São por isso, como já referimos, apropriados a braços que manipulem grandes cargas.
. O seu custo é elevado.
. Apresentam também problemas de manutenção, já que podem ocorrer vazamentos do óleo e desgaste da bomba e motores.
. Os lineares são mais compactos e robustos que os seus equivalentes eléctricos e pneumáticos e, assim, são apropriados para robots do tipo pórtico ou esféricos, que usam juntas prismáticas.
Nota: Para saber mais sobre o que é o torque, consulte estes dois posts / animações:
–> O que é o Torque (aka Binário)
–> Relação entre Potência (Cavalo-Vapor), Torque / Binário, e Velocidade Angular (RPM)



Figura 29 – Robots com Actuadores Hidráulicos
19.3. Actuadores Eléctricos
. Geralmente os robots são de tamanho pequeno a médio.
19.3.1. Tipos de Actuadores Eléctricos
Os actuadores eléctricos mais comuns são:
. Motor de corrente contínua;
. Servo-motor;
. Motor passo-a-passo.
19.3.2. – Características Mais Importantes
. Não proporcionam grandes velocidades de operação nem elevada potência, quando comparados com os hidráulicos, mas são de muito maior precisão.
. Em geral são dotados de redutores para se poder reduzir a velocidade e, assim aumentar o torque, quando necessário.
. Os actuadores eléctricos podem utilizar-se em juntas prismáticas, sendo que a transformação do movimento rotativo do motor para movimento linear do braço é feito através de um fuso.

Figura 30 – Exemplos de Fusos
. Os motores lineares não se utilizam em robótica, pois as forças que produzem são bastante pequenas.
. O custo do accionamento eléctrico cresce com o torque necessário para accionar o braço mecânico.
. O tamanho do motor é mais ou menos proporcional ao conjugado produzido.
. A simples redução de velocidade, através de redutor, embora proporcione maior precisão e torque, reduz muito a produtividade.
. Maior torque significa maior velocidade ou maior carga, e ambos são, geralmente, desejáveis.
. O custo dos actuadores hidráulicos cresce também com o torque, mas de uma forma mais lenta, já que os motores tendem a ser mais compactos.
. Adicionalmente, o custo dos equipamentos de condicionamento e controlo do fluido hidráulico é elevado e pouco influenciado pela escala.
. Daqui se conclui que, como mostrado na figura a seguir, o accionamento eléctrico é mais vantajoso economicamente em braços de pequeno e médio porte, ao passo que o hidráulico é melhor, como vimos, para grandes potências/cargas.

Figura 31 – Custo de braços robóticos em função da capacidade de carga, para o accionamento hidráulico e eléctrico
20. Questionário (IX)
1. O que entende por actuadores robóticos?
2. Quais os tipos de accionadores robóticos que conhece?
3. Enumere os principais componentes dos actuadores, de braços de robot, hidráulicos.
4. Para um robot de elevada precisão, os actuadores hidráulicos serão os mais aconselhados?
5. Os robots que utilizam actuadores hidráulicos são, em geral, de pequeno, médio ou grande porte?
6. Quais os tipos de motores hidráulicos, usados nos actuadores hidráulicos, que conhece?
7. Os motores elevados apresentam, em geral, um baixo, médio ou elevado torque (binário)?
8. Qual o maior problema de manutenção que os motores hidráulicos apresentam?
9. Quando comparado com o dos motores eléctricos usados nos braços robóticos, o custo dos motores hidráulicos é baixo, médio ou elevado,?
10. Enumere os tipos de actuadores eléctricos, utilizados em braços robóticos, que conhece.
11. Indique quais as afirmações falsas quais as verdadeiras
a) Comparados com os actuadores eléctricos, os actuadores hidráulicos são mais potentes.
b) Comparados com os actuadores eléctricos, os actuadores hidráulicos são mais rápidos.
c) Comparados com os actuadores eléctricos, os actuadores hidráulicos são mais precisos.
d) Nos actuadores eléctricos, quanto maior é o torque mais barato é o motor.
e) Nos actuadores eléctricos, quanto maior é o conjugado maior é o tamanho do motor.
12. Os actuadores eléctricos são, muitas vezes, equipados com redutores. Qual a função destes elementos?
13. Qual a vantagem e desvantagem do redutor?
14. Qual o tipo de juntas em que se usam os actuadores eléctricos?
15. Os fusos são elementos que se usam muito como componente dos actuadores eléctricos dos braços robóticos. Qual a sua função?
16. Por que motivo não se usam motores eléctricos lineares como elementos actuadores em braços robóticos?
17. Em que condições é que o accionamento eléctrico é mais vantajoso do que o hidráulico?
18. Em que condições é que o accionamento hidráulico é mais vantajoso do que o eléctrico?
[continua…]
Março 25, 2013 No Comments
Domótica – Curso de ETS3 – Parte 1
Curso Profissional de Electrónica, Automação e Comando
Disciplina de Automação e Comando
Módulo de Domótica
Programação e Colocação em Serviço de Instalações com Sistemas de Bus KNX/EIB/TP1
Curso de Software ETS3, para sistemas KNX/EIB
PARTE 1
A – Introdução ao Software ETS-3 Professional
O bus europeu de instalação (European Installation Bus) EIB, adiante tratado por KNX/EIB, é um sistema para a automatização integral de vivendas e edifícios que proporciona soluções flexíveis, compatíveis no futuro e economicamente rentáveis. Dispõe de uma grande quantidade de funções que não só permitem que seja utilizado em instalações simples, mas também permitem soluções de alto nível para todo o tipo de edifícios. O sistema bus de instalação KNX/EIB está focado, portanto, em satisfazer as necessidades das instalações eléctricas dos edifícios em geral, desde a instalação, a configuração do sistema de bus até à sua colocação em serviço e posterior manutenção.
A ferramenta de software para a programação da instalação é o ETS-3 (ETS, Engineering Tool Software, é uma marca registada pela EIBA) que é estruturada de forma flexível, extensível e modular para facilitar futuras ampliações da tecnologia KNX/EIB. Desta forma, é possível oferecer ao utilizador uma ampla ajuda online que facilita grandemente a obtenção de toda a informação necessária.
O ETS-3 instala-se sempre de forma completa no seu PC, sendo que o modo de funcionamento dependerá do tipo de licença instalada. Existem três versões:
. Versão demo: limitada à utilização de, no máximo, um projecto; limitada à utilização máxima de 20 dispositivos e sem acesso ao bus.
. Versão de formação: limitada à utilização de, no máximo, um projecto; limitada à utilização máxima de 20 dispositivos e com acesso ao bus. Limitada no tempo.
. Versão completa: sem limites de qualquer espécie.
O ETS-3 está estruturado nos seguintes programas:
. ETS-Tester – é o programa de aprendizagem do ETS-3 Starter, e tem como objectivo a iniciação no sistema.
. ETS Starter – é dirigido ao projecto de pequenos edifícios residenciais (uma linha, 64 dispositivos) com aplicações limitadas, como controlo de iluminação, controlo de persianas e controlo individual da temperatura das divisões.
. ETS-3 Profesional – substitui a geração actual do ETS-2, proporciona um controlo total da instalação e dispões de ligação por USB, sistema multiárea, descarga simultânea de diferentes dispositivos, exportação de projectos, etc.
A Vista de Parâmetros visualiza-se na forma de árvore, em vez de se apresentar na forma de páginas com separadores. A versão profesional integra todas as funcionalidades de desenho de projectos e a parametrização é feita num único ambiente de trabalho. Acrescentaram-se mais funções do tipo Windows, como por exemplo o Fazer e Desfazer, sempre tão útil 😉
O ETS-3 é uma ferramenta de software completamente nova que se pode instalar num PC que já tenha instalado o ETS-2, e ambos os programas podem funcionar em paralelo num mesmo computador, utilizando cada um deles a sua própria base de dados.
As bases de dados para o ETS-2 podem ser convertidas para o formato de base de dados do ETS-3 Profesional. Este possui um comportamento diferente do ETS-2 para guardar a informação, pois guarda na base de dados, de forma imediata, qualquer acção que seja completada na fase de desenho/projecto.
– Descrição do Ecrã de Apresentação / Ecrã Inicial
O ETS-3 oferece a novidade de que no mesmo ecrã de apresentação se poder realizar todas as funções de programação, colocação em funcionamento/serviço e diagnóstico da instalação, sem ter de abrir ou fechar outros módulos do programa, o que simplifica muito o trabalho de desenho/projecto do sistema KNX/EIB.
Título (Title): o título de uma janela contém o nome da ferramenta e, quando disponível, o nome da vista actual e do projecto.
Barra de Menus (Menu Bar): contém o nome dos vários menus.
Menu: aparece quando se selecciona uma entrada na barra de menus. Um menu contém funções, tanto básicas como específicas, dessa ferramenta.

Figura 1 – Ecrã de Apresentação do ETS-3
Barra de Ferramentas (Tool Bar): as barras de ferramentas contêm botões com símbolos que nos permitem um acesso rápido a todas as funções mais importantes do ETS-3.
![]()
Figura 2 – Barra de Ferramentas
Através do ícones, as ordens e as funções mais importantes do ETS-3 podem ser executadas com um simples clique do rato. Quando os ícones estejam sombreados a cinzento não podem ser usados. A possibilidade de utilizar as funções que se escondem por detrás de cada ícone depende das funções activas do programa em cada momento.
![]()
Figura 3
Os ícones representados abaixo (Abrir Projecto (Open/Manage Projects…), Abrir Catálogo (Open Catalog), Desfazer (Undo) e Refazer(Redo)) também possuem junto à sua imagem uma seta que aponta para baixo.
Se clicarmos o botão, abrir-se-á uma lista de selecção, como se mostra na figura seguinte:

Barra de Estado (Status Bar): mostra a informação do estado das selecções, as ordens e as operações activas da aplicação, a cada momento.
Menu de Contexto (Context Menu): aparece quando clicamos no botão direito do rato e depende da janela que se encontra activa. Esse menu contém as funções aplicáveis ao elemento seleccionado.
Importar Bases de Dados (Import…): a importação de bases de dados dos fabricantes é uma condição necessária prévia para se poder executar qualquer projecto; por isso, importar-se-ão tantas bases de dados quantos os fabricantes que possuam componentes que queiramos incorporar no nosso projecto.

Fig. 4 – Importar bases de dados
Os ficheiros de bases de dados de produtos têm a extensão «.vd1», «.vd2» ou «.vd3», esta última para a versão 3 do ETS.
– Ligação com o Bus
Através do elemento Online do menu Extras podemos estabelecer uma ligação entre o ETS-3 Profesional e o bus ou, pelo contrário, desligarmo-nos do mesmo. Na barra de estado mostrar-se-á a situação em cada momento, através dos símbolos ![]() (OFFLINE, não ligado) ou
(OFFLINE, não ligado) ou ![]()
Quando o ETS 3 Profesional esteja ligado ao sistema KNX/EIB, o endereço físico da BCU da interface local, aparecerá junto ao símbolo de ONLINE.
![]()
Fig. 5
As funções de Programação (Comissioning) ou as funções de Diagnóstico (Diagnostics) fazem com que o ETS-3 passe a modo Online automaticamente.
– Janelas de Edição (Vistas do Projecto)
As diferentes janelas de edição do ETS-3 são também chamadas de vistas do projecto. As janelas editoras abrem-se a partir do menu Ver (View) e Vistas do projecto (Project Views) ou então através dos ícones correspondentes da barra de ferramentas. Na parte esquerda da janela temos um navegador com a estrutura da informação na forma de árvore e, na parte direita, temos a informação na forma de listas.
Existem as seguintes janelas de edição (vistas do projecto):
. Vista de edifícios (Buildings)
. Vista de aparelhos (All Devices)
. Topologia (Topology)
. Endereços de grupo (Group Adresses)
. Aparelhos modificados (Modified Devices)
. Aparelhos ainda não associados a uma linha (Devices not assigned to a Line)
. Aparelhos ainda não associados com uma divisão/função (Devices not assigned to a Room/Function)
. Raiz do projecto (Project Root)

Figura 6 – Vistas do Projecto
Março 19, 2013 No Comments









